URDF Manipulator Tutorial
Custom URDF manipulators tutorial
Workspace
A workspace named ws_manipulators is created.
$ mkdir -p ~/ROS/ws_manipulators/src
$ cd ~/ROS/ws_manipulators/src/
$ catkin_init_workspace
$ catkin_create_pkg manip1 std_msgs rospy
$ cd ~/ROS/ws_manipulators/
$ catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
URDF Model
$ mkdir -p ~/ROS/ws_manipulators/src/manip1/urdf
$ mkdir -p ~/ROS/ws_manipulators/src/manip1/rviz
$ cd ~/ROS/ws_manipulators/src/manip1/urdf/
Inside this folder create the file manip1.xacro with the following contents:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="manip1">
<xacro:property name="joint_min_lim" value="${-pi/2}"/>
<xacro:property name="joint_max_lim" value="${pi/2}"/>
<xacro:property name="width" value="0.080"/>
<xacro:property name="L1" value="0.500"/>
<xacro:property name="L2" value="0.300"/>
<xacro:property name="L3" value="0.250"/>
<xacro:property name="L4" value="0.050"/>
<xacro:property name="m4" value="0.300"/>
<!--Cylinder-->
<xacro:macro name="default_cylinder" params="length">
<origin xyz="0.0 0.0 ${length/2}" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="${width/2}" length="${length}"/>
</geometry>
</xacro:macro>
<!--Cube-->
<xacro:macro name="default_cube" params="length">
<origin xyz="0.0 0.0 ${length/2}" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="${length} ${length} ${length}"/>
</geometry>
</xacro:macro>
<!--Inertial cuboid-->
<xacro:macro name="inertial_cuboid" params="m lx ly lz">
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<mass value="${m}"/>
<inertia
ixx="${(1/12)*m*(ly**2 + lz**2)}"
ixy="0.0"
ixz="0.0"
iyy="${(1/12)*m*(lz**2 + lx**2)}"
iyz="0.0"
izz="${(1/12)*m*(lx**2 + ly**2)}" />
</xacro:macro>
<!--Materials-->
<material name="white">
<color rgba="0.8 0.8 0.8 1.0"/>
</material>
<material name="red">
<color rgba="0.8 0.0 0.0 0.5"/>
</material>
<!--World-->
<link name="world">
</link>
<!--Base-->
<link name="base_link">
<inertial>
<xacro:inertial_cuboid m="5.000" lx="0.400" ly="0.400" lz="0.010"/>
</inertial>
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.400 0.400 0.010"/>
</geometry>
<material name="white">
</material>
</visual>
</link>
<joint name="base_joint" type="fixed">
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<parent link="world"/>
<child link="base_link"/>
</joint>
<!--Link_1-->
<link name="link_1">
<inertial>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<mass value="0.0"/>
<inertia ixx="0.0" ixy="0.0" ixz="0.0" iyy="0.0" iyz="0.0" izz="0.0"/>
</inertial>
<visual>
<xacro:default_cylinder length="${L1}"/>
<material name="red">
</material>
</visual>
<collision>
<xacro:default_cylinder length="${L1}"/>
</collision>
</link>
<joint name="joint_1" type="revolute">
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="link_1"/>
<axis xyz="0.0 0.0 1.0"/>
<limit lower="${joint_min_lim}" upper="${joint_max_lim}" effort="0.0" velocity="0.0"/>
</joint>
<!--Link_2-->
<link name="link_2">
<inertial>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<mass value="0.0"/>
<inertia ixx="0.0" ixy="0.0" ixz="0.0" iyy="0.0" iyz="0.0" izz="0.0"/>
</inertial>
<visual>
<xacro:default_cylinder length="${L2}"/>
<material name="white">
</material>
</visual>
<collision>
<xacro:default_cylinder length="${L2}"/>
</collision>
</link>
<joint name="joint_2" type="revolute">
<origin xyz="0.0 ${-width} ${L1}" rpy="0.0 ${pi/2} 0.0"/>
<parent link="link_1"/>
<child link="link_2"/>
<axis xyz="0.0 1.0 0.0"/>
<limit lower="${joint_min_lim}" upper="${joint_max_lim}" effort="0.0" velocity="0.0"/>
</joint>
<!--Link_3-->
<link name="link_3">
<inertial>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<mass value="0.0"/>
<inertia ixx="0.0" ixy="0.0" ixz="0.0" iyy="0.0" iyz="0.0" izz="0.0"/>
</inertial>
<visual>
<xacro:default_cylinder length="${L3}"/>
<material name="red">
</material>
</visual>
<collision>
<xacro:default_cylinder length="${L3}"/>
</collision>
</link>
<joint name="joint_3" type="revolute">
<origin xyz="0.0 ${width} ${L2}" rpy="0.0 0.0 0.0"/>
<parent link="link_2"/>
<child link="link_3"/>
<axis xyz="0.0 1.0 0.0"/>
<limit lower="${joint_min_lim}" upper="${joint_max_lim}" effort="0.0" velocity="0.0"/>
</joint>
<!--Link_4-->
<link name="link_4">
<inertial>
<xacro:inertial_cuboid m="${m4}" lx="${L4}" ly="${L4}" lz="${L4}"/>
</inertial>
<visual>
<xacro:default_cube length="${L4}"/>
<material name="white">
</material>
</visual>
<collision>
<xacro:default_cube length="${L4}"/>
</collision>
</link>
<joint name="joint_4" type="revolute">
<origin xyz="0.0 0.0 ${L3}" rpy="0.0 0.0 0.0"/>
<parent link="link_3"/>
<child link="link_4"/>
<axis xyz="0.0 0.0 1.0"/>
<limit lower="${joint_min_lim}" upper="${joint_max_lim}" effort="0.0" velocity="0.0"/>
</joint>
</robot>
Test the file manip1.xacro running the following command:
$ cd ~/ROS/ws_manipulators/src/manip1/urdf
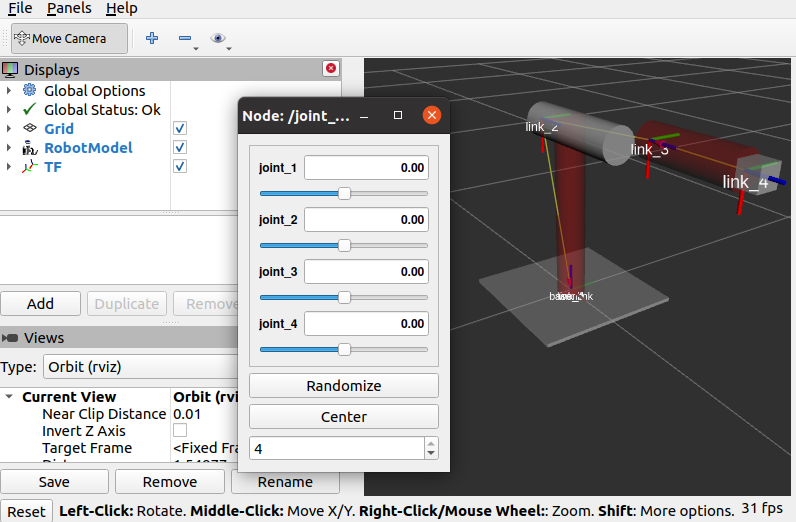
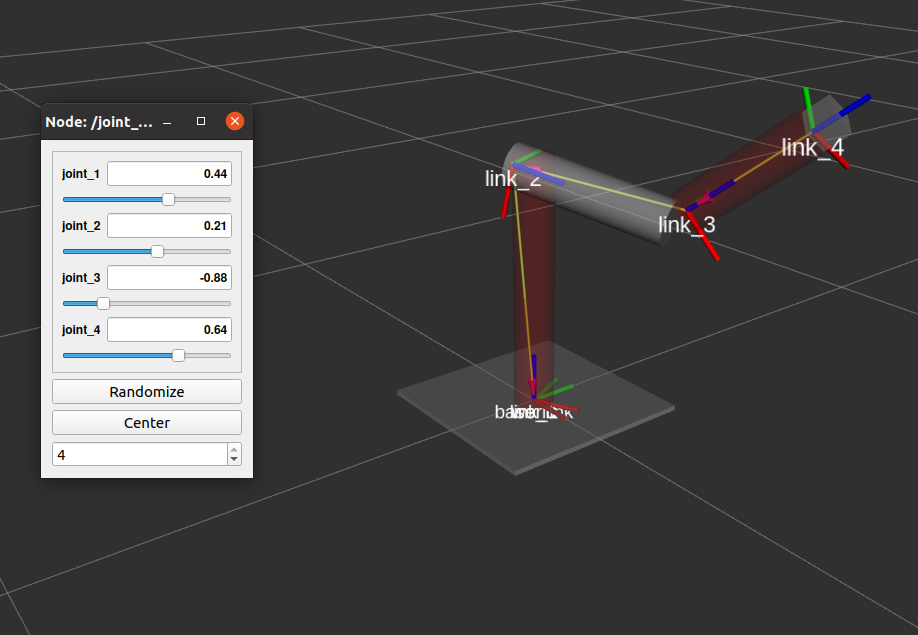
$ roslaunch urdf_tutorial display.launch model:=manip1.xacro
RVIZ will open showing the robot and the joint controller.
RVIZ launch file
Create the directory launch on ~/ROS/ws_manipulators/src/manip1:
$ mkdir -p ~/ROS/ws_manipulators/src/manip1/launch
Add the file manip1_rviz.launch on launch directory with the following contents:
<launch>
<arg name="model" default="$(find manip1)/urdf/manip1.xacro"/>
<arg name="gui" default="true" />
<arg name="rvizconfig" default="$(find manip1)/rviz/urdf.rviz"/>
<param name="robot_description" command="$(find xacro)/xacro $(arg model)"/>
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"/>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true"/>
</launch>
Add the file urdf.rviz on ~/ROS/ws_manipulators/src/manip1/rviz with the following contents:
Panels:
- Class: rviz/Displays
Name: Displays
- Class: rviz/Views
Name: Views
Visualization Manager:
Displays:
- Class: rviz/Grid
Name: Grid
Value: true
- Alpha: 0.8
Class: rviz/RobotModel
Enabled: true
Name: RobotModel
Robot Description: robot_description
Value: true
- Class: rviz/TF
Name: TF
Value: true
Marker Scale: 0.4
Global Options:
Fixed Frame: base_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz/MoveCamera
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 1.7
Name: Current View
Pitch: 0.33
Value: Orbit (rviz)
Yaw: 5.5
Window Geometry:
Height: 800
Width: 1200
Add the following line to .bashrc
source ~/ROS/ws_manipulators/devel/setup.bash
Remember to comment any other ROS workspaces, as in my case:
source /opt/ros/noetic/setup.bash
# Commented because not active ROS workspace
# source ~/ROS/ws_moveit/devel/setup.bash
source ~/ROS/ws_manipulators/devel/setup.bash
Close the current terminal and open a new one. If you type $ roscd it will point to ~/ROS/ws_manipulators/devel$
Run to launch RVIZ with robot model and joint publisher GUI.
$ roslaunch manip1 manip1_rviz.launch